| EDUCATION: 1998 DOCTOR OF PHILOSOPHY (Architecture), University of Michigan School of Architecture +Urban Planning. 1997 MASTER OF SCIENCE degree, University of Michigan School of Architecture + Urban Planning 1989 MASTER OF ARCHITECTURE degree, University of Utah Graduate School of Architecture, including one year at Kanagawa University, Yokohama, Japan. 1987 BACHELOR OF UNIVERSITY STUDIES degree (with emphasis on East Asian Studies), University of Utah. PROFESSIONAL EXPERIENCE: 1998-present PRESIDENT of Plug-in Creations Architecture, LLC, Eugene, Oregon. Duties: Full range of architectural services, industrial design, aerospace architecture. 1988-1998 ARCHITECT with Kajima Corporation, Tokyo, Japan. Duties: Con-ceptual design and building systems research. 1978-1984 DESIGNER and PROJECT MANAGER for Wolff/Lang /Christopher, Architects, Rancho Cuca-monga, California. Duties: Full range of architectural services. ACADEMIC EXPERIENCE: 2001-present ASSISTANT PROFESSOR (Lecturer), The University of Hong Kong Department of Architecture. 1998-2001 ASSISTANT PROFESSOR (visiting), University of Oregon Department of Architecture, 1996-1997 INSTRUCTOR at University of Michigan School of Art.
ORGANIZATIONS & ACTIVITIES (selected) :
2000-present MEMBER American Institute of Aeronautics and Astronautics (AIAA) Design Engineering Technical Committee (DETC) Aerospace Architecture subcommittee. HONORS, AWARDS & PATENTS (selected) : 2000 DESIGN MERIT AWARD for Plug-in Condominiums in "Far Eastern Inter-national Digital Architecture Design" competition presented by the Far Eastern Foundation. 1999 GOLD AWARD for Environmental Sensitivity in "Shelter Resorts" competition presented by the Valor Group. 1997 WINNER of the International Audi Design competition for outstanding design of the QAMEL modular vehicle design. | | |
| Through the application of expandable design grammars, shape grammars,and open-ended procedural rules, flexible parametric kit-of-parts systems can be defined that are adaptable to any contextual setting.
Since a well-designed component can be mass-produced and used over and over again, fabrication processes can be worked out in advance for robotic manufacturing and automated assembly. In my work I have explored concepts for robotic construction using kit-of-parts systems, and have experimented with concepts that use building parts as extensions of robotic mechanisms, and automated construction hardware incorporated into building elements [3, 5].The term "Kit-of-parts Theory" refers to the study and application of object-oriented building techniques, where building components are pre-designed / pre-engineered / pre-fabricated for inclusion in joint-based (linear element), panel-based (planar element), module-based(solid element), and deployable (time element) construction systems [2].
Kit-of-parts construction is a special subset of pre-fabrication that not only attempts to achieve flexibility in assembly and efficiency in manufacture, but also by definition requires a capacity for demountability, disassembly, and reuse. Through the application ofexpandable design grammars, shape grammars, and open-ended procedural rules, flexible parametric kit-of-parts systems can be defined that are adaptable to any contextual setting [1]. Kit-of-parts architecture involves organizing the millions of individual parts and raw material in a building into assemblies of standard easy-to-manufacture components, sized for convenient handling or according to shipping constraints. The construction of the building is carried out on the assembly level as opposed to the raw material level. The architect defines a parts library describing every major assembly in the building. The assemblies are conceived in a systematic way, based on certain rules such as increment, size, or by shape grammar. Standard connections between the assemblies are carefully defined, so the number of possible shapes and appearance the parts can take is limitless. In traditional construction methods, buildings are erected in "final line" construction, where raw materials, tools, labor and such are all gathered to the site and processed on the spot. The use of kit-of-parts construction turns the entire building process into "assembly line" style, where many different manufacturing events can occur in parallel in safe, controlled environments, using robotics and automated construction.
Automated construction technologies have arisen out of the need to introduce greater efficiency into construction processes, incorporate information-based technologies, eliminate dangerous site conditions and address labor shortages. Though the industry has called for incremental development, the goal of the researcher has been to produce a fully autonomous design / construction system which can be controlled or monitored remotely throughout the entire life cycle of the building. To realize the dream of full autonomy, recent construction automation research not only attempts to establish feasibility and develop more robust marketable systems, but also strives to organize the digital representation of process, product, and machine. The eventual scenario dictates that the digital building model will know how to output its own real-world counterpart through information infrastructures and automated manufacturing systems much the same way a word processing document becomes hard copy in a printer.
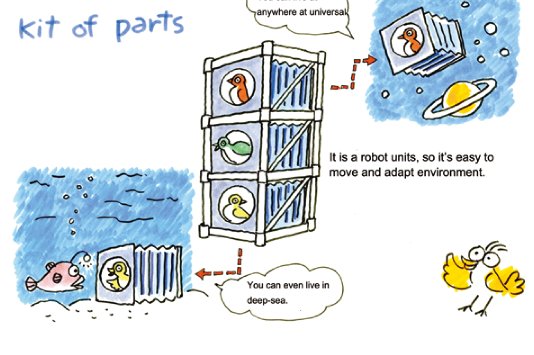
The Birdhouse Condo is a robotic construction system that takes fulladvantage of time-based geometry. Each apartment unit in the stored condition takes up the minimum amount of room for shipping and handling, and the robotic mechanism lifts the units into place and deploys them.
The model has been designed and manufactured digitally, so no drawings were necessary. Two-dimensional fabrication files were derived from the 3D solid model, and sent directly to numerical controlled laser cutters.
Eventually, buildings will be designed, manufactured, and constructed completely by machines. This will be useful for designing habitats in harsh environments such as space or deep sea [4]. | | |